







Предлагаем вниманию читателей адаптированный перевод статьи китайских исследователей «Применение искусственного интеллекта при геотехнических изысканиях». Эта работа была опубликована в электронном виде в сборнике Advances in Artificial Intelligence, Big Data and Algorithms («Достижения в области искусственного интеллекта, больших данных и алгоритмов») международным издательством IOS Press. Статья находится в открытым доступе по лицензии CC BY NC 4.0, которая позволяет копировать и распространять ее, адаптировать, видоизменять и создавать новое, опираясь на нее, но не в коммерческих целях, при указании вида лицензии, типов изменений и ссылки на первоисточник. В данном случае полная ссылка на источник для перевода приведена в конце.
При геотехнических изысканиях широко используются методы динамического зондирования грунтов пробоотборником (SPT) или сплошным наконечником без отбора проб (DPT). Однако в этих случаях при сборе данных могут возникать ошибки, часто связанные с человеческим фактором. Для решения данной проблемы в статье предложено использовать такую разновидность технологии искусственного интеллекта, как усовершенствованный алгоритм YOLOv5 для автоматического подсчета количества ударов молота. Архитектура исходной нейросети YOLOv5 была улучшена следующим образом. Во-первых, была введена функция потерь с фокусировкой для устранения дисбаланса выборки, что обеспечивало более эффективную обработку ударов молотов разных типов. Кроме того, использовалась технология отбора сложных примеров в процессе обучения в режиме онлайн для повышения точности модели (за счет концентрации внимания модели на сложных примерах, наиболее информативных для обучения). Затем улучшенная модель YOLOv5 применялась для выявления ударов молота при испытаниях методами SPT и DPT. Для упрощения обучения модели и ее работы был создан набор данных (изображений) для детекции молотов разных типов, адаптированный к требованиям конкретных методов геотехнических испытаний. Результаты экспериментов показали высокую эффективность усовершенствованной модели YOLOv5 для выявления и автоматического подсчета ударов молота (на тестовом наборе изображений) на основе использованного набора обучающих данных.
ДЛЯ СПРАВКИ
YOLO (You Only Look Once) – это алгоритм на основе глубокого обучения, используемый в области компьютерного зрения для распознавания объектов на изображениях или в видеопотоках. Он был впервые предложен в 2015 году Джозефом Редмоном с соавторами (https://arxiv.org/abs/1506.02640) и стал известен своей способностью объединять детекцию и классификацию объектов в один проход нейросети, что значительно ускоряло распознавание по сравнению с предыдущими методами, например R-CNN.
К сегодняшнему дню существует уже 13 официальных версий YOLO. Но их последовательность не всегда означает прямое эволюционное усовершенствование.
В ряду YOLOv1–v5 каждая из версий действительно строилась путем добавления к предыдущему варианту улучшений в архитектуре, точности детекции и скорости работы. Однако YOLOv5 официально не является продолжением серии от создателей оригинального YOLO (Джозефа Редмона с коллегами), поскольку был выпущен компанией Ultralytics (в 2020 году) и сильно отличается от YOLOv1–v4 по структуре и кодовой базе.
В ряду YOLOv6–v13 некоторые версии разрабатывались разными командами и не являются прямым продолжением YOLOv1–v5. То есть они используют концепцию YOLO и общие принципы детекции объектов, но могут сильно различаться по архитектуре и возможностям.
В представленной здесь статье рассматривается улучшенный алгоритм глубокого обучения YOLOv5, который совершенно нельзя рассматривать как устаревший для решения задач геотехнических изысканий. Наоборот, он имеет большой потенциал для использования в этой сфере. YOLOv5 активно применяют в разных странах при полевых динамических испытаниях грунтов, но пока только в процессе научных исследований, для экспериментальных проектов. Эта версия еще не стала массово применяемым инструментом при геотехнических изысканиях для строительства.
В России сейчас тоже активно развиваются технологии искусственного интеллекта и их применение в разных областях, но конкретно для полевых динамических испытаний грунтов методами SPT и DPT таких решений в открытых отечественных источниках пока не было найдено. Эти испытания продолжают проводить с «ручной» фиксацией ударов молота, использованием стандартных датчиков и традиционных статистических методов обработки данных.
Чтобы внедрить в стандартную повседневную практику геотехнических изысканий использование YOLOv5 и других подобных технологий, нужны дополнительные усилия: создание специализированных наборов данных, адаптация моделей к специфике испытаний, интеграция искусственного интеллекта с существующим оборудованием, стандартами испытаний, методами анализа данных, а также налаживание процессов сертификации результатов для инженерных расчетов и др.
Геотехнические изыскания включают несколько этапов: постановка задачи, планирование проекта, полевые изыскания, лабораторные испытания, обработка данных, проверка и утверждение результатов исследований, подготовка отчетных документов по проекту. Целью является сбор исчерпывающей информации о площадке будущего строительства, поэтому геотехнические изыскания играют ключевую роль в процессе развития проекта.
При этом одной из основных проблем геотехнических исследований является обеспечение точности данных. В частности, для изыскателей критически важен точный подсчет числа ударов молота при полевых динамических испытаниях грунтов такими методами, как:
Для «ручного» сбора информации при таких испытаниях присуща неопределенность, что может приводить к ошибкам в статистически обработанных данных и, как следствие, влиять на результаты геотехнических изысканий.
Благодаря развитию технологий искусственного интеллекта (ИИ) различные методы ИИ уже успешно применяются в разных отраслях. В данной статье предлагается использовать передовые методы ИИ для автоматического подсчета числа ударов молота в ходе полевых динамических испытаний грунтов при геотехнических изысканиях, чтобы исключить неточности, вызванные человеческим фактором. Целью работы является решение соответствующих проблем, влияющих на качество и успешность строительства, путем использования более надежной и эффективной альтернативы ручным подсчетам.
Алгоритмы ИИ для детекции объектов нашли широкое применение в разных сферах, включая интеллектуальные системы видеонаблюдения, автономное вождение и аэрофотосъемку с беспилотных летательных аппаратов. Их цели заключаются в автоматической идентификации конкретных объектов на изображениях или в видеопотоках.
Существующие алгоритмы распознавания объектов можно разделить на два основных класса:
1) двухстадийные методы детекции объектов с предварительным извлечением областей/зон, представляющих интерес, например:
2) одностадийные/сквозные методы детекции объектов, например:
Применение алгоритмов детекции объектов при геотехнических изысканиях может обеспечить инженеров ценными инструментами для эффективного и точного сбора необходимой информации, оценки качества строительства и выявления потенциальных опасностей. Поэтому исследование возможностей их использования при изысканиях имеет большое практическое значение.
Алгоритмы детекции объектов за последние годы достигли значительного прогресса, что привело к их широкому применению в различных сферах. Поскольку разные сценарии и типы объектов обусловливают разные уникальные задачи, для их эффективного решения был разработан ряд детекторов.
Одним из первых инструментов для детекции объектов был алгоритм R-CNN, в котором используется селективный (выборочный) поиск в целях извлечения из изображений областей (зон), представляющих интерес, после чего для каждой из них выполнялись классификация и регрессия ограничивающих рамок.
На основе R-CNN были созданы алгоритмы Fast R-CNN и Faster R-CNN, направленные на дальнейшее повышение эффективности и расширение возможностей детекции объектов. В детектор Fast R-CNN был внедрен слой объединения признаков областей интереса, что повысило точность и скорость детекции за счет эффективной обработки этих зон. В архитектуру детектора Faster R-CNN была встроена нейронная сеть RPN (Region Proposal Network – «сеть предложений областей интереса»), что автоматизировало процесс генерации зон-кандидатов и значительно повысило скорость и общую эффективность работы алгоритма.
Рассмотренная серия алгоритмов R-CNN показала хорошую точность распознавания объектов. Однако они имели такие недостатвки, как низкая скорость детекции, сложность в использовании и ограничения при необходимости работы в режиме онлайн, то есть в обработке данных по мере их поступления, например по мере поступления кадров видеопотока, для чего нужна высокая скорость.
Эти проблемы были решены в серии алгоритмов YOLO, которые получили значительно увеличенную скорость работы в режиме онлайн и улучшенную точность детекции объектов.
В алгоритме YOLOv1 [4], предложенном в 2016 году, используются:
Однако относительно неглубокая архитектура сети YOLOv1 (с малым числом слоев) ограничивает общую точность детекции объектов (то есть долю правильных предсказаний от общего количества предсказаний, accuracy), делая эту версию менее подходящей для решения задач с высокой точностью положительных предсказаний (то есть долей верных положительных предсказаний от общего числа положительных предсказаний, precision).
В последующих версиях, таких как YOLOv2 [6], интегрированы слои нормализации выходных сигналов по пакетам (батчам) и базовые (анкерные, якорные, опорные) рамки для выделения объектов разных размеров, с различными соотношениями сторон и положением на изображении.
В YOLOv3 [7] улучшены скорость и стабильность работы модели за счет реконструкции архитектуры базовой сети DarkNet.
Хотя в серии алгоритмов YOLO постепенно повышалась точность детекции объектов, было замечено постепенное уменьшение скорости их работы. Версии YOLOv4 [8] и YOLOv5 [9] в 2020 году расширили границы как точности, так и скорости, став передовыми алгоритмами в области детекции объектов. На тот момент эти алгоритмы продемонстрировали наивысшую среднюю точность положительных предсказаний (Average Precision, AP) на наборе данных для задач компьютерного зрения COCO (Common Objects in Context – «общие объекты в контексте» [10]), превзойдя в этом другие алгоритмы, такие как Faster R-CNN и Mask R-CNN [11].
В целом важно находить баланс между точностью и скоростью в зависимости от конкретных требований каждой задачи. Среди множества доступных алгоритмов детекции объектов одним из сильнейших стал YOLOv5 благодаря его очень высокой эффективности. Работа этого алгоритма сочетает высокие скорость и точность, а также возможности точной локализации, что обеспечило ему высокие оценки и широкое применение в последние годы.
В данной работе предлагается расширение возможностей архитектуры YOLOv5 за счет дополнительных улучшений. В частности, авторами были включены функция потерь с фокусировкой и метод отбора сложных примеров в процессе обучения в режиме онлайн. Они были применены к задаче детекции ударов молота при полевых динамических испытаниях грунтов методами SPT и DPT, проводимых в рамках геотехнических изысканий. Предлагаемый подход оптимизирует процесс сбора данных благодаря автоматическому подсчету ударов молота во время этих испытаний.
Результаты представленного здесь исследования имеют большое значение для развития технологий применения искусственного интеллекта в инженерных изысканиях, поскольку содержат ценную информацию, на основе которой можно получить рекомендации для будущих исследований и разработок в этой отрасли. Соответствующий вклад данной работы состоит в следующем:
1) впервые успешно использован алгоритм детекции объектов в области искусственного интеллекта для распознавания молота при геотехнических изысканиях и предложен метод автоматизированного подсчета числа ударов;
2) представлена улучшенная версия YOLOv5, в которой компонент потерь классификации дополнен функцией потерь с фокусировкой, что позволяет модели уделять больше внимания труднообнаруживаемым и менее многочисленным положительным примерам;
3) применен метод отбора сложных примеров в режиме онлайн (Online Hard Example Mining, OHEM) для динамической настройки модели, повышения ее точности и улучшения эффективности распознавания труднодетектируемых объектов.
В данной статье рассматривается эволюция серии алгоритмов YOLO, приводится подробное описание предложенного улучшенного метода работы с YOLOv5, представлены и проанализированы результаты экспериментов, подводятся итоги исследований, обсуждаются перспективы их дальнейшего развития.
В алгоритме YOLOv1, предложенном Джозефом Редмоном с соавторами, используется единая нейронная сеть для прямого прогнозирования ограничивающих рамок и вероятностей присутствия классов объектов на изображении. Такой одностадийный/сквозной подход позволяет эффективно обрабатывать большое количество данных, обеспечивая высокую скорость и масштабируемость работы алгоритма [12]. Однако YOLOv1 имеет ограничения в точности локализации и может допускать ошибки в классификации перекрывающихся объектов.
В YOLOv2 применены методы, повышающие
общую точность детекции объектов (долю правильных предсказаний от общего количества предсказаний, accuracy) и точность положительных предсказаний (долю верных положительных предсказаний от общего числа положительных предсказаний, precision). Для улучшения стабильности работы модели использован слой пакетной нормализации (нормализации по батчам), а также применены базовые/анкерные рамки, заданные заранее. Кроме того, YOLOv2 может выполнять детекцию мелких объектов за счет объединения низкоуровневых детализированных признаков с высокоуровневыми сверточными семантическими признаками посредством слияния каналов. Но, несмотря на то что YOLOv2 демонстрирует улучшенную общую точность (accuracy) по сравнению с предшествующим YOLOv1, проблемы с локализацией и ошибками классификации объектов в нем остаются.
Алгоритм YOLOv3 еще больше усовершенствован по сравнению с YOLOv2. Благодаря новой базовой сети DarkNet-53, сочетающей элементы архитектур Darknet-19 и ResNet [13], обеспечена совместимость с входными данными разных масштабов и повышена гибкость модели. Также введен метод кластеризации K-means (К-средних) для генерации базовых рамок разных размеров, что улучшает способность обнаруживать мелкие и плотнo расположенные объекты.
Алексей Бочковский с соавторами внесли дальнейшие улучшения в YOLOv3 и в 2020 году представили YOLOv4. В этой версии реализована архитектура частичных межстадийных связей (Cross-Stage-Partial, CSP), обеспечивающая эффективную передачу информации между предыдущими и последующими слоями, что дает повышение общей точности и скорости детекции объектов. Для уточнения карт признаков и, соответственно, увеличения точности детекции и улучшения способности распознавать мелкие объекты внедрены такие механизмы внимания, как модуль пространственного внимания (Spatial Attention Module, SAM) и модуль внимания сверточных блоков (Convolutional Block Attention Module, CBAM). Благодаря введению сети агрегации путей/маршрутов (Path Aggregation Network, PANet [14]) еще больше улучшены возможности извлечения признаков, что позволяет модели лучше распознавать мелкие и множественные объекты. Кроме того, значительно повышена эффективность работы за счет использования таких алгоритмов и модулей, как блоки пирамидального, то есть многоуровневого, пространственного объединения признаков (SPP-blocks, Spatial Pyramid Pooling blocks) и паноптические пирамидальные сети признаков (panoptic feature pyramid networks).
Алгоритм YOLOv5, предложенный в июне 2020 года, отличается от предыдущих компактной архитектурой сети и введением передовых технологий, таких как плавная сигмоидоподобная функция активации (функция типа Swish) и регуляризация с блоковым дропаутом, при которой случайные блоки нейронной карты признаков временно обнуляются для предотвращения переобучения (метод DropBlock), что дополнительно повышает эффективность детектора. Также введена новая стратегия искусственного расширения обучающей выборки, специально разработанная для повышения точности обнаружения мелких объектов.
Структура сети YOLOv5
Для YOLOv5 существует четыре версии, различающиеся по глубине и ширине нейронной сети: YOLOv5s, YOLOv5m, YOLOv5l и YOLOv5x [15–17].
Для данной работы была выбрана версия YOLOv5l, которая лучше соответствует специфическим требованиям задач, решаемых при геотехнических изысканиях. Она имеет больший размер модели по сравнению с YOLOv5s и YOLOv5m и при этом сохраняет высокую скорость вывода по сравнению с YOLOv5x, что делает ее подходящей для обнаружения объектов в режиме онлайн.
Ключевыми компонентами YOLOv5 являются (рис. 1):
Рис. 2. Схема процесса обучения модели с использованием метода OHEM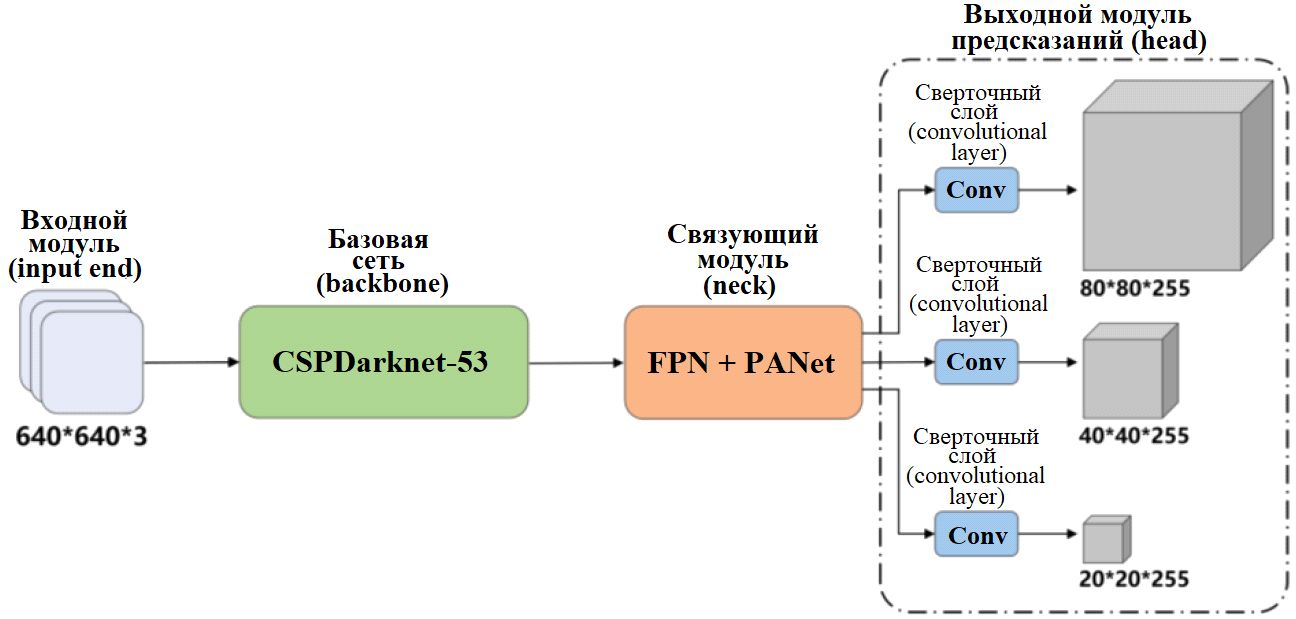
Применение метода OHEM в процессе обучения позволяет модели сосредоточиться на сложных примерах, благодаря чему она лучше усваивает их отличительные черты, что приводит к повышению точности и надежности детекции ею объектов.
Функция потерь с фокусировкой
Функция потерь в YOLOv5 может быть выражена следующим образом:
Рис. 3. Примеры типов молотов (1 и 2)
Для формирования указанного набора данных на площадке проведения динамических испытаний грунтов методами SPT и DPT применялась съемка высокоразрешающими видеокамерами. Затем полученные видеозаписи обрабатывались путем извлечения отдельных кадров, которые впоследствии отбирались для получения множества изображений. Для обеспечения точной разметки применялся специальный инструмент под названием LabelImg, с помощью которого аннотировалось наличие молота на каждом изображении. Всего набор данных включал 2400 обучающих и 800 тестовых (для проверки работы модели) изображений, при этом на каждом из них присутствовал только один детектируемый молот.
Состав экспериментальной системы
В состав экспериментальной системы входили следующие компоненты:
1) аппаратная часть: использовалась видеокарта NVIDIA GeForce RTX 1060s с 6 ГБ видеопамяти;
2) программная среда: эксперименты проводились в операционной системе Windows 11 с применением такой интегрированной среды разработки на языке программирования Python, как PyCharm 2022.1, и такой платформы с набором инструментов для параллельных вычислений на видеокартах (GPU) компании NVIDIA, как CUDA 11.8;
3) среда (фреймворк) глубокого обучения: использовалась библиотека для глубокого обучения PyTorch 2.0.0 (которая предоставляет инструменты для построения, обучения и оценки нейросетей).
Во время обучения модели использовался адаптивный алгоритм оптимизации Adam (Adaptive Moment Estimation – «Адаптивная оценка моментов»), который использует скользящие оценки среднего и дисперсии градиента. Размер пакета данных (батча) составлял 32 примера/изображения, и обучение модели проводилось в ходе 100 итераций. Параметр фокусировки γ в функции FL (см. формулу (2)) был задан равным 1,5.
Показатели оценки
В данной работе для оценки качества и эффективности модели использовалась средняя точность положительных предсказаний, усредненная по всем классам детектируемых объектов (mean Average Precision, mAP, в отличие от Average Precision, AP – средней точности положительных предсказаний для одного конкретного класса). Для определения этой метрики нужны следующие показатели.
На основе этих показателей можно вычислить такие метрики, как точность положительных предсказаний P (precision) и полнота R (recall) детекции молота для каждого класса.
Точность положительных предсказаний P определяется как отношение количества истинно положительных срабатываний (TP) к сумме истинно положительных и ложноположительных оценок (TP+FP).
Полнота R определяется как отношение количества истинно положительных предсказаний (TP) к сумме истинно положительных и ложноотрицательных срабатываний (TP+FN).
Если речь идет о точности P и полноте R для распознавания моделью конкретного класса детектируемых объектов k, то используют соответствующие обозначения с нижним индексом k:
Рис. 4. Примеры результатов детекции молотов. Полученные значения средней точности положительных предсказаний, усредненной по обоим классам молотов (mAP), указаны над соответствующими фотографиями, сделанными на площадке испытаний
После 25 эпох обучения (полных проходов модели по всему обучающему набору данных с пересчетом потерь, mAP и других метрик) качество работы модели на тестовом наборе данных вышло на стабильный уровень, как показано на рисунке 5. Следует отметить, что итоговая модель дала высокое значение mAP, составившее 0,8753 при пороге IoU, равном 0,5. А величина mAP, усредненная для диапазона порога IoU от 0,5 до 0,95, составила 0,8383. Эти результаты говорят о высокой точности распознавания моделью ударов молота.
Рис. 5. Динамика качества работы модели на тестовом наборе данных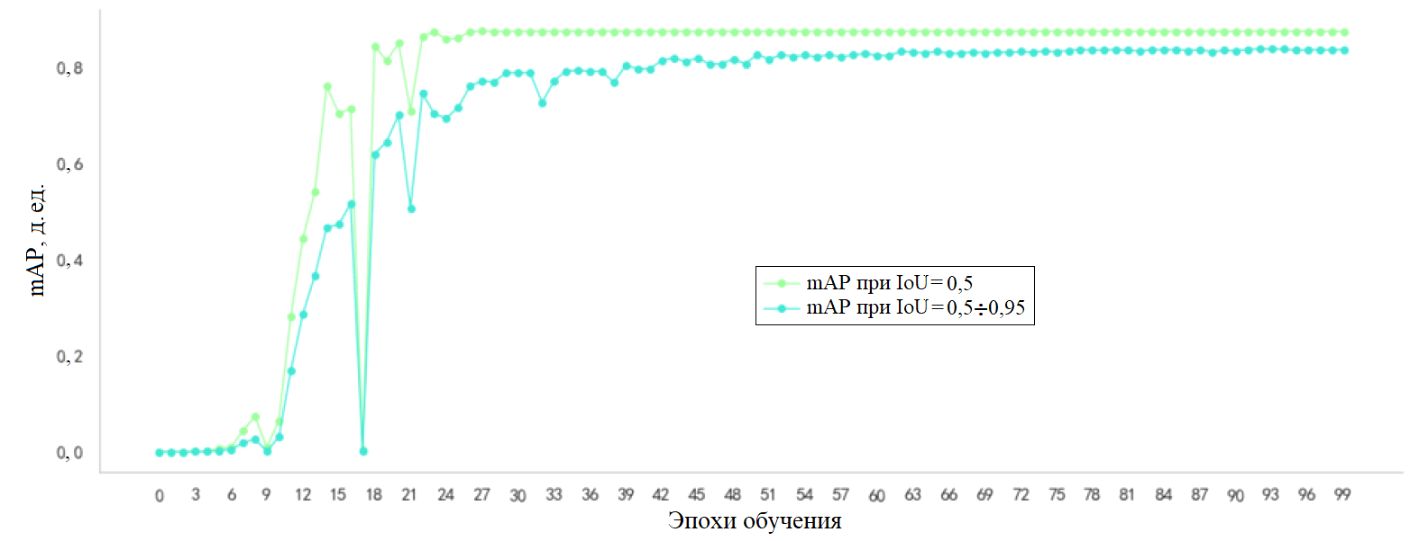
После детекции положения молота определение того, совершался ли удар (было ли это движением вниз), выполнялось на основе изменения координаты центра молота. Критерий был следующим: если смещение центра молота вниз превышало 10 единиц по сравнению с предыдущим кадром и это происходило не менее 4 раз за 8 последовательных кадров, то фиксировался один удар (одно нисходящее движение). Чтобы исключить повторный подсчет одного и того же удара, после каждого зарегистрированного удара вводилась пауза длиной в 15 кадров, в течение которой подсчет не выполнялся. Процесс считался завершенным, если в течение 10 минут не было зафиксировано ни одного движения вниз.
Экспериментальные испытания подтвердили эффективность предложенного метода: он может обеспечить точный автоматический подсчет числа ударов молота во время динамических испытаний грунтов методами SPT и DPT при геотехнических изысканиях, позволяя избежать ошибок в регистрации данных, возникающих при ручном подсчете.
В представленном исследовании был усовершенствован алгоритм YOLOv5. В него были введены функция потерь с фокусировкой и метод обучения на сложных примерах в режиме онлайн для использования в процессе обучения нейросети. Этот модифицированный алгоритм был обучен и протестирован на собранном авторами наборе данных по динамическим испытаниям грунтов методами SPT и DPT, в который входили изображения молотов (кадры видеопотоков), что позволило создать надежную модель для детекции этих объектов при подсчетке количества ударов.
Полученные экспериментальные результаты продемонстрировали высокую эффективность улучшенного алгоритма YOLOv5. Средняя точность положительных предсказаний, усредненная по двум исследованным классам молотов (mean Average Precision, mAP), достигла величины 0,838.
Поскольку благодаря постоянно проводимым геотехническим изысканиям продолжают поступать новые видеоданные с площадок испытаний, существующий набор данных по молотам постоянно пополняется и уточняется. Это позволит проводить дальнейшие исследования по оптимизации модели детекции молотов при полевых динамических испытаниях грунтов, а также увеличить охват и эффективность применения методов распознавания разных объектов при геотехнических изысканиях.
Mei H., Zhang W., Gu J. The application of artificial intelligence in geotechnical investigation // Frontiers in Artificial Intelligence and Applications. Vol. 373. Advances in Artificial Intelligence, Big Data and Algorithms. Amsterdam, Netherlands: IOS Press, 2023. P. 263–273. DOI:10.3233/FAIA230818.